VALISE MPP2
Valise de Moteurs Pas à Pas N°2
Cette page décrit la solution de commande électronique de monture de téléscope avec des composants de machines à commande numérique.
Ce choix remonte à une bonne vingtaime d'années. Il provient du besoin de commander mes machines de polissage de miroir.
Je trouvais que la gestion des axes était bien étudiée et fiable, donc je l'ai généralisé à mes téléscopes.
Cette solution se base sur un logiciel sur PC et l'utilisation du port parrallèle IEEE1284 (aussi appelé interface centronic).
Elle provient du monde des modélistes amateurs qui ont, les premiers, conçus et developpés des cartes d'interfaces sur ce port IEEE1284.
Ensuite les fabricants asiatiques ont repris le principe, ils ont fabriqués en masse et les prix ont diminués.
Ceci s'est amplifié par la CNC et les imprimantes 3D.
L'industrie de l'asservissement des moteurs a depuis longtemps séparé les 3 éléments de base.
- Moteurs (Evidement)
- Drivers de puissance commandé par quelques signaux: Enable, Direction, et Pas.
- L'électronique capable de générer des signaux pour plusieurs moteurs et réaliser l'interpolation linéaire.
Et là beaucoup de solutions alternatives existent.
Celle dont je parle ici, est la solution où un logiciel sur PC : MACH3 génère les signaux d'interpolation et il utilise
une carte d'interface d'E/S.
C'est la chute des prix des drivers de moteurs par micropas qui me conduit à réaliser la valise MPP2 qui utilise des drivers de 128 micropas.
Alors que la première valise MPP1 utilise des drivers allant jusqu'à 16 micropas.
Elle est en photo à la fin de cette page html.
Les composants
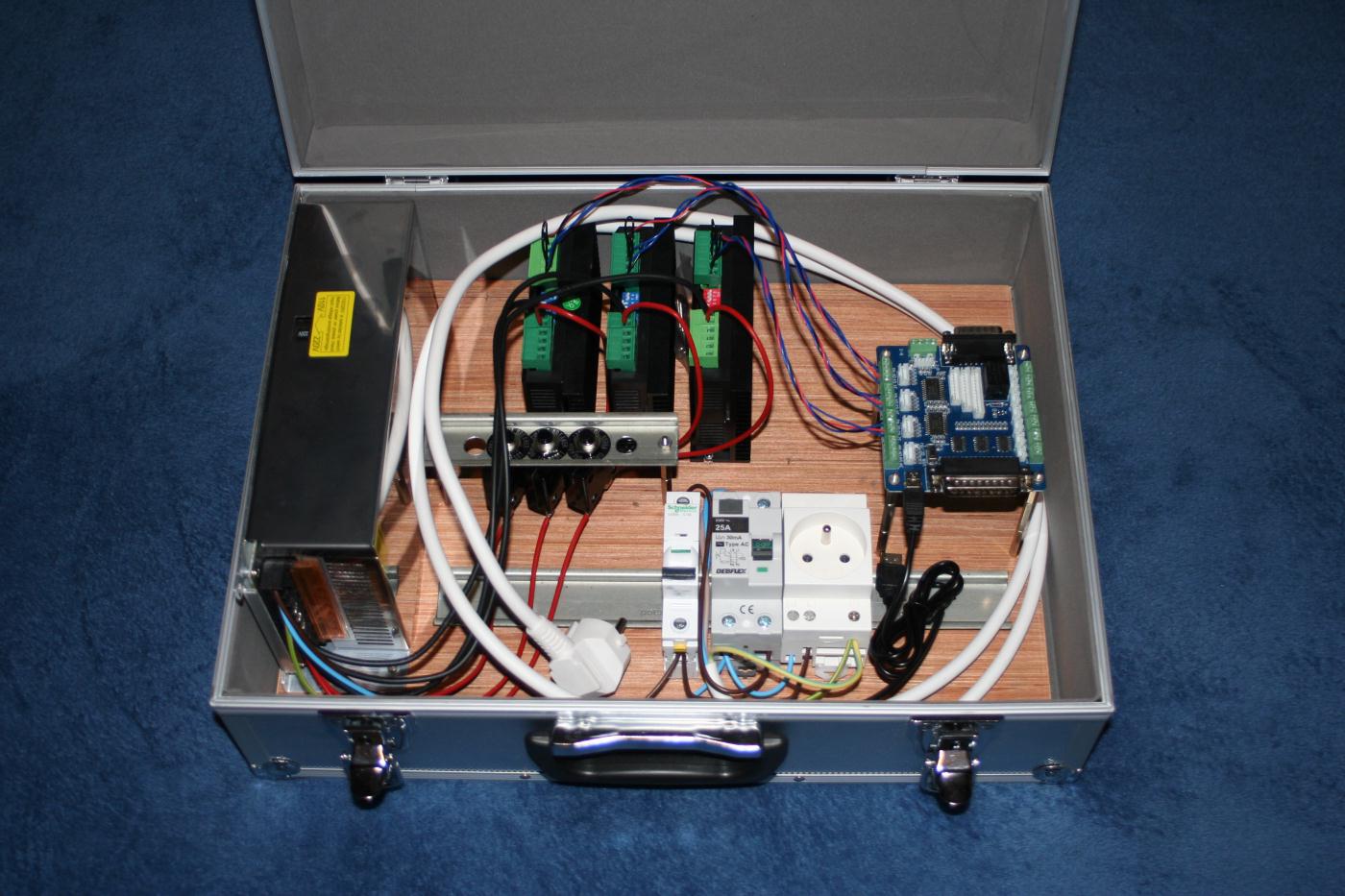
Cette photo montre les composants principaux de la valise.
C'est très joli quand il n'y a pas les cables :-).

Composants :
- Une plaque pour installer fixer et cabler sans les contraintes des parois de la valise.
- Rail oméga bas profil 12+30cm
- Disjoncteur différentiel 30mA 25A
- Disjoncteur thermique 3A
- 1 bloc prise 220V (pour recevoir une alimentation 5V USB).
- 3 (à 5) Fusibles rémarmables 5A (1 par driver de moteur)
- 1 Alimentation 220Vac 36Vcc
- 3 (à 5) drivers de moteur DM556 (128 micropas par pas)
- 1 carte d'interace IEEE1284.
- 1 cable 220Vac ralonge de 3m.
Le choix des composants ci dessus ne fait pas trop débat.
Quant au choix de la valise d'outillage comme boitier électronique, il m'est venu pour ces raisons:
- Une poignée de transport.
- Boitier léger.
- De la place pour cabler et ranger les cables électriques.
- De la place pour y installer jusqu'à 5 drivers de moteurs.
- La possibilité d'ouvrir la valise s'il y a besoin de ventiler ou la fermer quand on utilise la valise par temps froid.
- Boitier peu couteux qu'on retrouve fréquemment dans les magasins de bricolage.
Le cablage
Cette photo montre le cablage terminé.
C'est moins joli, mais ça va beaucoup mieux marcher :-)
Je ne donne pas le schéma électrique car vous le trouverez dans la notice de chaque composant et aussi dans les documents de MACH3.
La mise en oeuvre de la valise
Ayant subit quelques expériences de grillage des drivers de moteurs et même d'une carte d'interface (c'est le métier qui rentre).
J'ai fini par adopter ces consignes:
- Ne rien alimenter avant de suivre ces opérations dans l'ordre.
- Ne jamais faire tourner les moteurs Pas à pas quand un driver est branché. Votre moteur est un générateur!
- Configurer les Switchs des Drivers pour l'intensité qui convient à chaque moteur. Comme le montre cette photo:
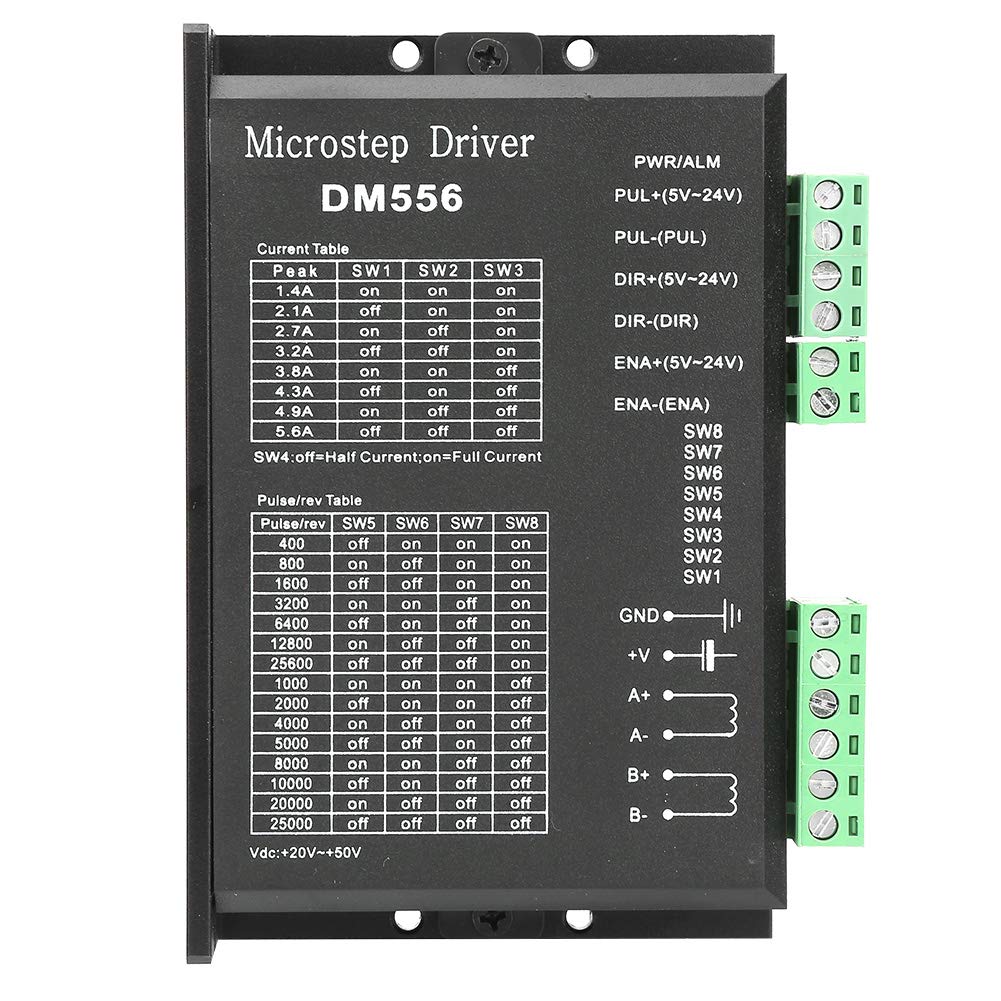
- Configurer les Switchs des Drivers qui sélectionnent la résolution en micropas. Ce choix ne dépend pas du moteur mais de votre application.
- Brancher tous les cables. Moteurs aux drivers, PC à la carte. Mais ne rien alimenter.
- Allumer le PC et lancez Mach3. Cela va initialiser correctement toutes les lignes du port IEEE1284.
- Allumer le 5V de la carte d'interface.
- Mettre sous tension les drivers de moteurs.
MACH3
Ce logiciel n'est pas la solution du pauvre, il est répandu dans les commandes de machines industrielles
mais vous ne le reconnaitrez pas forcément au premier coup d'oeil car l'interface graphique utilisateur est
spécialisée pour chaque fabricant de machine.
Je n'utilise que la version standard et gratuite qui est limitée en nombre de lignes de programmes en GCODE.
Une petite note sur les fichiers de configurations, convention de nommage
MACH3 utilise un fichier de configuration en XML qui prends en compte les échelles sur les axes, la configuration des E/S, les touches raccourcis...
Il est arrivé aussi que des cartes d'interfaces n'aient pas toutes les mêmes affectations des lignes d'E/S.
Le nom du fichier de configuration doit donc prendre en compte :
La machine, la carte d'interface, et la résolution des drivers qui ont un impact sur les facteurs d'échelle;
en effet MACH3 ne connait pas le réglage que vous faites sur la résolution entre chaque pas moteur,
une impulsion de sortie pour MACH3, c'est un micropas pour le driver.
Adaptation à l'Astronomie
Recensement des besoins.
On pourrait penser que 5 moteurs c'est beaucoup...
Pour une monture équatoriale:
- 1 moteur en entrainement horaire.
- 1 moteur pour la déclinaison.
Pour une moture Alt-azimuthale.
- 1 moteur pour la hauteur.
- 1 moteur pour l'azimuth.
- 1 moteur pour le dérotateur de champs ou pour la table équatoriale.
Pour tous les cas:
- 1 moteur pour la mise au point.
- 1 moteur pour un volet de protection du miroir.
Nous arrivons à 5 sans peine, finalement, nous "consommons" vite ces ressources.
La carte d'interface dispose aussi d'un relais destiné à commander le moteur de la fraiseuse, en astronomie il peut servir à
dégivrer, déclencher une photo,...
Les échelles et unités
MACH3 est conçu pour les machines d'usinage, donc il prend les conventions de la mécanique où l'unité est le mm,
du coup il ne prévoit pas de marquer le nom de l'unité après l'affichage des positions sur tous les axes.
Quand on utilise MACH3, il faut garder en tête la convention adoptée, par exemple
le premier axe (en Alpha) peut être en heure. Le second peut être la déclinaison en degré.
Les raccourcis clavier
MACH3 permet de commander les moteurs directement via des touches rapides sur le clavier. Ce qui vient à l'idée naturellement c'est d'utiliser les flèches.
Ok pour 2 axes c'est pratique! Mais pour les 3 autres moteurs ?
Alors j'ai pris la convention suivante le sens + est piloté par les 5 touches AZERT et le sens - par les touches juste en dessous QSDFG.
Note : il existe des tout petits claviers radio qui évitent de s'encombrer avec un grand clavier et un fil.
Comment faire le GOTO et l'entrainement horaire ?
Nous utilisons le logiciel CDC Carte Du Ciel , la sélection d'une position clic droit vous offre le transfert des coordonnées vers le Clipboard.
Les coordonnées sont soit azimutales ou équatoriales, au format décimal ou en degré minute secondes.
Que ce soit en VBA, en C ou en Python, il est très facile de récupérer les données du clipboard et de générer un petit fichier GCODE.
La scrutation de nouvelles coordonnées dans le clipboard, ne demande même pas votre intervention.
Par contre il faut que vous demandiez à MACH3 d'exécuter le nouveau fichier GCODE.
Une autre possibilité consiste à utiliser les VBscript pour récupérer le clipboard et lancer directement le mouvement vers les coordonnées voulues.
Cette dernière solution est décrite dans le document que vous trouverez sous le joli nom : Mach2_6.11_Custom.pdf
Adaptation de l'IHM
Il existe une possibilité de concevoir une interface utilisateurs qui pourrait être mieux adaptée à un télescope.
Ces IHM peuvent être developpées avec un logiciel peu couteux et téléchageable.
Exemples de fichiers GCODE
Je donnerai plusieurs exemples de fichiers GCODE, parce que il y a plus ou moins de fonctionalités à automatiser:
Pointage approximatif, pointage précis, lancement du suivi, ouverture/ fermeture de volet, activation du relais.
Le mode Remote
Le mode remote est possible puisque MACH3 tourne sur un PC.
Conclusion:
Je pense que c'est une solution peu couteuse (150E tout compris), portable, maniable, multiusages; bien pratique pour de nombreux TP.
Pour l'astronomie, mon parti pris est clairement de disposer d'une chaine de logiciels gratuits, spécialisés et interopérables,
plutôt que des outils qui intègrent tout mais dont les tests sont difficiles et incomplets.
Il y a quelques détails que je n'ai pas évoqué ici, comme la gestion des origines des axes.
J'en parlerai par email avec les gens intéressés...
Et maintenant une nouvelle
Cette solution était liée à l'interface IEEE1284 donc à des PC anciens et le drivers des impulsions de pas
des moteurs ne fonctionnait que sous Windows XP.
Il y a récemment une nouvelle solution qui nous libère des contraintes du port IEEE1284 et du système d'exploitation.
Elle est décrite dans cette page.
Contactez moi pour vos remarques ou des erreurs qui se seraient glissées dans cette page.
mailto:gerald.mauboussin@gmail.com
Page crée le 30.12.2022
- - - - -Dernière mise
à jour 14.05.2023.
Copyright
2006 - 2023 Toutes les pages de ce site ne peuvent être
reproduites sans le consentement de son auteur.