Ce projet ne devait commencer que lorsque l'interfomètre de Bath aurait fonctionné et que les retouches du miroir auraient été satisfaisantes. A l'époque : Lambda sur 3, par la mesure de l'appareil de Foucault, et les abérrations transversales étaient supérieures à la taille d'un pixel d'APN.
Il est tout à fait faisable d'aller à moins de 20nm d'erreurs à condition de connaitre exactement le relief sur toute la surface et pas seulement sur un axe.
Néanmoins, avoir confiance dans les résultats de l'interfero de Bath ne va pas de soi, car la lumière traverse plusieurs dioptres avant de former les interferences. Je pense que plusieurs expériences restent à faire, plusieurs variables à faire bouger pour savoir si le résultat est vraiment indépendant de l'instrument de mesure.
Alors à court terme, c'est le tube du téléscope et les étoiles qui serviront à qualifier le miroir par la méthode de Rodier.
AVERTISSEMENT : Le texte qui suit n'est pas adapté aux constructeurs débutants car il utilise des notions, des "raccourcis" et fait rappel à des solutions déjà décrites dans la littérature. Veuillez m'en excuser, des lecteurs m'en ont fait la remarque.
OBJECTIFS :
Le but étant de faire de ce téléscope un astrographe, les exigences principales du téléscopes sont :
E
L'obligation du correcteur de champs découle des dimensions du capteur et du rapport F/D de ce miroir.
Les correcteurs du marché sont dans un format adaptés à des coulants de porte oculaires de 2" (50,8mm) et 3" .
Or en 2" et avec un miroir à F/D=3,5 , cela conduit à un vignetage ; Il faudrait avoir des lentilles de 62mm de diamètre utile. C'est ce qui m'a poussé à concevoir un correcteur de champs avec OSLOedu. Entrer les données des dioptres est assez simple. Au début, je me suis fié à des exemples d'un livre mais ces données étaient fausses; les dioptres entraient en collision. J'ai corrigé mais interprèter les résultats et les échelles des graphiques a demandé plus de temps.
Une chose est sure : il faut passer au format de porte oculaire 3" .
Compte tenu de la taille du miroir principal, la question d'un foyer primaire se pose.
Inconvénients : une surface optique de plus => un peu plus de perte de lumière, et une pièce optique de qualité en plus => coût plus important.
Avec un foyer primaire les problèmes suivants se posent :
Comme les avantages d'une solution correspondent aux inconvénients de l'autre solution, je dirai... " Les deux mon Colonel ! ".
Comment répondre qualitativement aux problèmes du foyer primaire ? Quelles sont les pistes à explorer ?
| Comment faire la mise au point ? | Le pas de vis est la solution qui accepte les charges plus importantes. Plusieurs solutions pour la motorisation. |
| Comment faire tourner l'APN ou la caméra ? | Tube concentriques lisse et collerette. |
| Comment faire passer les fils d'alimentation de l'APN et les cables de commandes ? | Coller les fils sur la tranche des branches de l'araignée. |
| Comment éviter la buée ? | Installer un fil chauffant autour de la première surface optique, ou faire arriver de l'air sec. |
| Comment supprimer les jeux entre l'APN et l'araignée ? | Rappel par ressort et huile fine pour le système de mise au point. Pas de graisse. |
| Comment fixer l'APN ? | Par une bague dite "d'inversion" Pas de vis M58 0,5. |
| Comment fixer un filtre qui empêche la buée ou la poussière de rentrer ? | Faire un filet dans la bague d'inversion pour visser un filtre 2" Sinon le correcteur de champs peut aussi jouer ce role. |
| Comment monter un spectro ? | La fente et le collimateur devront être au foyer primaire, un petit miroir plan renverrait la lumière sur le coté vers le réseau et l'APN. |
| Comment mettre en place le montage photographique oculaire+ objectif et APN ? | Oculaire au foyer primaire + petit miroir plan + APN sur le coté. |
| Comment faire pour monter un support de miroir plan pour le foyer Newton ? | Dessiner l'araignée pour installer un foyer primaire d'un coté du centre de l'araignée. Et installer le support de miroir plan de l'autre coté du centre. Le centre de l'araignée doit être un tube creux. |
Autres contraintes de conception de l'araignée:
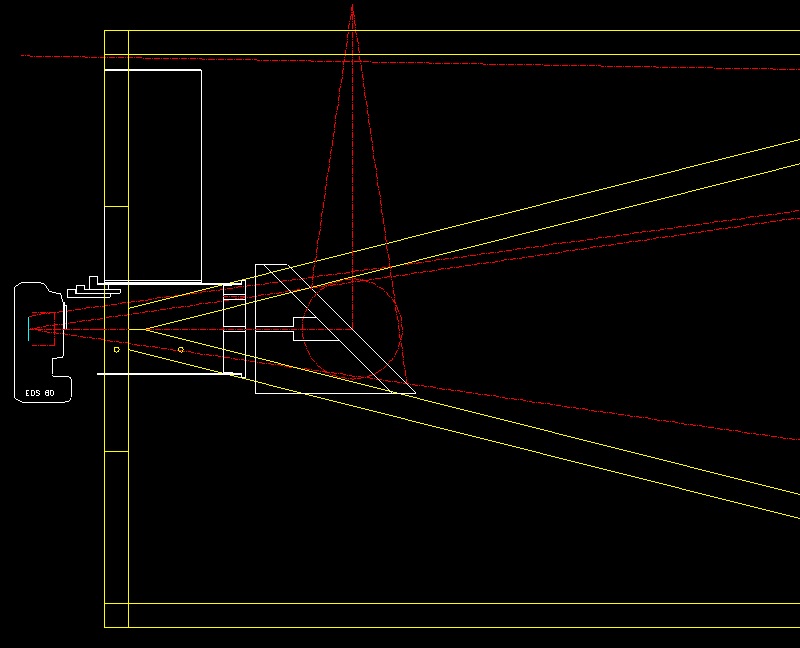
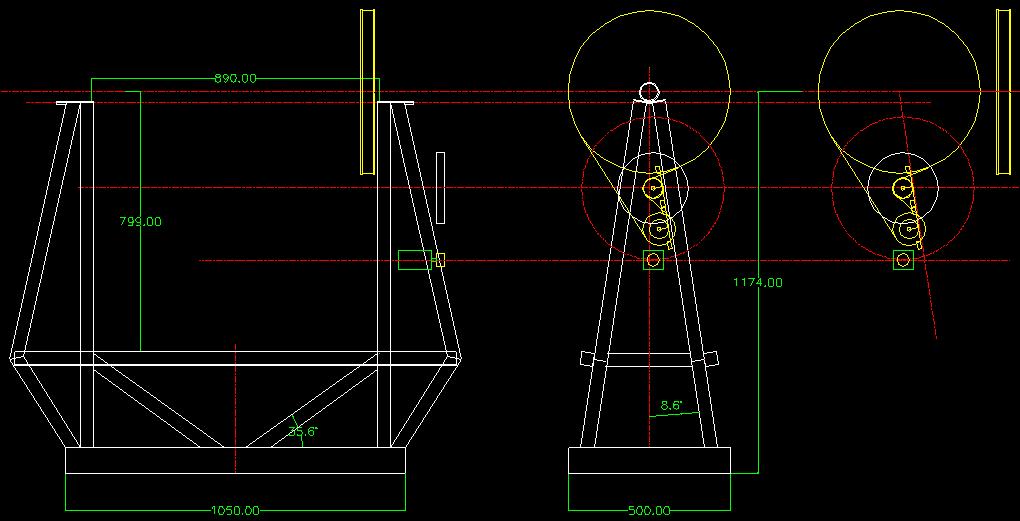
Ce plan d'encombrement montre les faisceaux optiques et des axes de symétrie en rouge, le tube Serrurier en Jaune, les autres pièces en blanc devraient etre hachurée car elles sont en coupe et des copies de symetrie n'ont pas été dessinées pour une question de clareté. Le dessin comprends la solution Foyer primaire et foyer Newton. Pour passer de l'un à l'autre des pièces s'enlèvent.
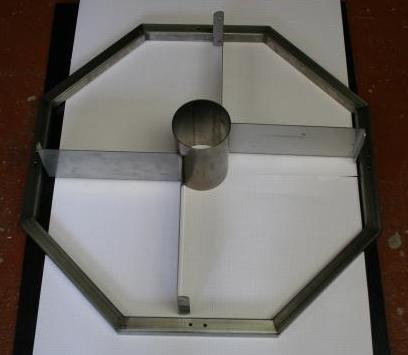
Photo des premières pièces :

Poids de l'araignée y compris l'APN 6D = 5kg
Deux exigences essentielles du barillet :
A) Le miroir doit être soutenu par un nombre de points suffisament important pour ne pas avoir plus de flexions, que d'erreurs sur le profil du miroir. C'est là que PLOP intervient. Le logiciel PLOP indique que 18 points d'appuis sont suffisant:
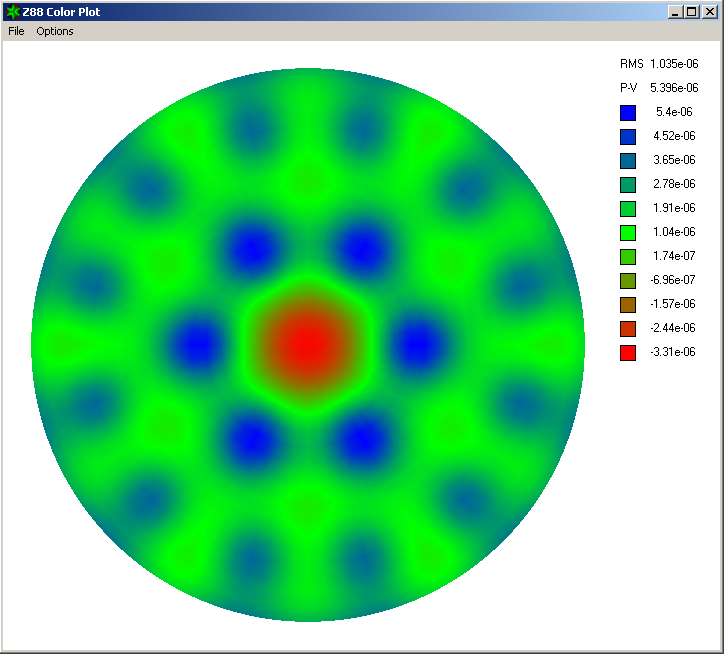
Le PV (Peak to Valley) est indiqué en mm. Donc 5,39nm, de déformation c'est acceptable. Le centre a pris un petit coup de rouge, mais il est caché par l'obstruction centrale.
B) Le miroir ne doit pas bouger lorsque le tube change d'inclinaison. L'appui sur les tranches par des points pose le problème de la déformation induite par ces appuis. La solution de la sangle est la meilleure, mais quelle est son élasticité et quelle va être la translation du miroir ? Remplacer la sangle par un cable en acier semble qualitativement encore meilleur, mais doit être validé de la même façon.
Deux exigences secondaires :
C)Le barillet doit etre protégé de tout acccès direct d'un utilisateur.
D)Le barillet doit être motorisé. Pas seulement pour régler la collimation mais aussi pour la mise au point focale et la compensation de dilatation thermique du tube.
La solution proposée par PLOP consiste en 3 balanciers ayant 2 triangles de 3 points de soutien, donc 18 points. Les triangles sont des étoiles à 3 branches en profilé carré de 30x30mm ep 3mm. Les triangles
Les calculs de flexions des pièces du barillet sont réalisés avec cette feuille de calcul http://jean.lamaison.free.fr/flexion.html
La masse totale du miroir est de 35kg.
La charge sur chaque point des triangles est donc de 35 / 18 points = 2kg => 2daN (arrondi volontaire à la valeur supérieure)
Section poutre carrée 30x30mm ep 3mm. Distance entre points d'appui 74,70mm. Déformation calculée = 0,00mm
La charge sur chaque point des balanciers est de 6kg => 6daN.
Section poutre carrée 30x30mm ep 3mm. Distance entre points d'appui 97,65mm. Déformation calculée = 0,00mm.
(J'aurais bien aimé avoir plusieurs chiffres après la virgule. Mais cette page est comme ça. Pour l'ordre de grandeur : il fallait charger à 800daN pour qu'une déformation de 0,01mm apparaisse dans le résultat. )
En position verticale ou horizontale, la charge sur les triangles et balanciers change. Elles s'annulent quand le miroir est en position verticale et sont maximales quand le miroir est en position horizontale.
Photo du dessous du barillet : 3 moteurs pas à pas entrainent leurs pignons dentées pour régler la collimation ou faire la mise au point focale.
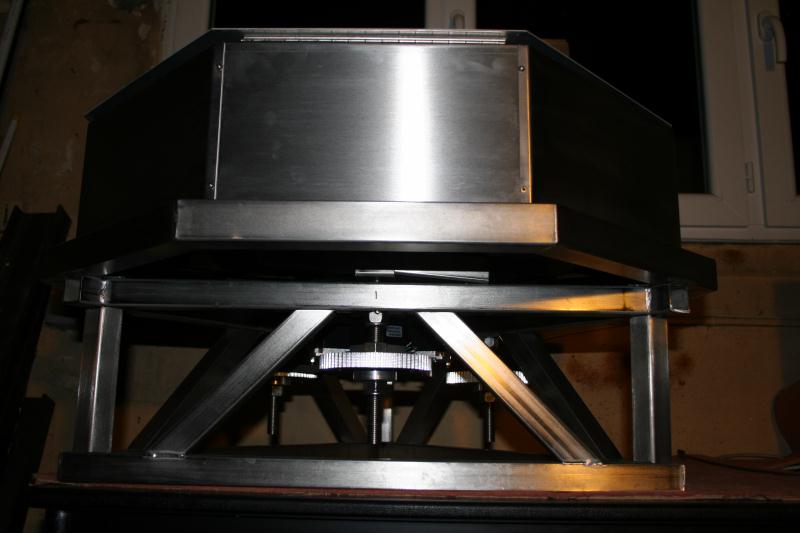
Photo des triangles et des 18 points d'appuis :

Photo du dessus du barillet : volets fermés. Ces volets seront motorisés pour être commandable à distance. Les volets sont en aluminium, peinture laquée cuite au four.

Maintenant nous connaissons les masses :
| Barillet | 33,0 kg |
| Anneau inox hexagonal (chaque) | 5,6 Kg |
| Araignée seule | 3,3 kg |
| Araignée + porte oculaire foyer primaire + APN | 5 kg |
| Palier autoaligneur (chaque) | 4,7kg |
| Miroir principal | 36 kg |
| Caisson central | 15,5 kg |
L'idée de départ était : tube Serrurier. Déformable à l'avant et à l'arrière. Tube athermique; caison central en aluminium. Les tubes en inox.
Mais problèmes :
A) Les simulations montrent que le caisson central en aluminium ne pourra jamais (raisonablement) être assez large pour atténuer la dilatation des tubes INOX. Donc l'aluminium pour le caisson central est éliminé.
B) Les tubes en Inox ne sont pas la meilleure solution pour limiter la dilatation thermique du tube, l'inox est également plus élastique. Néanmoins, je garde ce matériau pour sa pérénnité même si le telescope reste sans coupole, la facilité de souder et d'avoir de belles soudures, la possibilité de laver le miroir à l'intérieur du tube et la possibilité de faire circuler de l'air dans les tubes . Je reporte donc les contraintes sur la surveillance de la température des tubes et éventuellement sur l'asservissement du système de mise au point de l'APN. Sans controle de température, il faudra refaire une mise au point focale avant chaque photo, et espérer que la température ne changera pas de 10°c pendant la pose.
Les données sont :
Tube carré Inox de 30x30x2 mm
Les résultats sont les suivants pour un delta de température de 10°c :
Alongement du tube = 241microns
Alongement de la focale = 86microns (dans le même sens que la dilatation du tube donc cela soustrait les 2 données, sauf que le verre changera de température moins vite que l'acier)
Flexions du tube de 0 à 90° = 7microns
Flexion du caisson central entre le palier à semelle et les points d'appui des branches : 30 microns si la charge est de 50kg. ( Résultat donné par ce lien: http://jean.lamaison.free.fr/flexion.html )
Pour le montage du tube, il fallait commencer par souder le caison central, avec sa planéité, et son bon équerrage, il a pu servir de base à une construction bien symétrique. Puis souder la structure arrière (coté barillet) en vérifiant la longueur de toutes les diagonales entre l'octogone et le caisson.
Ensuite j'ai soudé les triangles coté araignée. L'octogone du haut n'a pas été soudé, il est vissé.

L'araignée est aussi vissée, le pointage des trous a été réalisé grace à du papier cadrillé, sinon le parallélisme des branches opposées n'était pas garantit. D'abord il fallait centrer le tube ensuite vérifier le parallélisme.
Finalement avec araignée et barillet, le tube ressemble à ceci :

Les deux boulons qui apparaissent de chaque coté sont réservés aux paliers à semelle. L'axe delta ne traverse pas le caisson. Les avantages sont les suivants:
Certaines faces des tubes inox devront être peintes en noir mat.
Autre photo du barillet et du caisson central:
Ce calcul a été fait avec une feuille de calcul Excel. En prenant l'inertie de chaque éléments par rapport à sa distance à l'axe de rotation. Le résultat est la matrice d'inertie 3-3.
Résultats sur la même feuille de calcul. Le dimensionnement des moteurs est un sujet largement remaché en automatisme ou robotique. J'ai suivi les indications d'un article de Francis Binet.
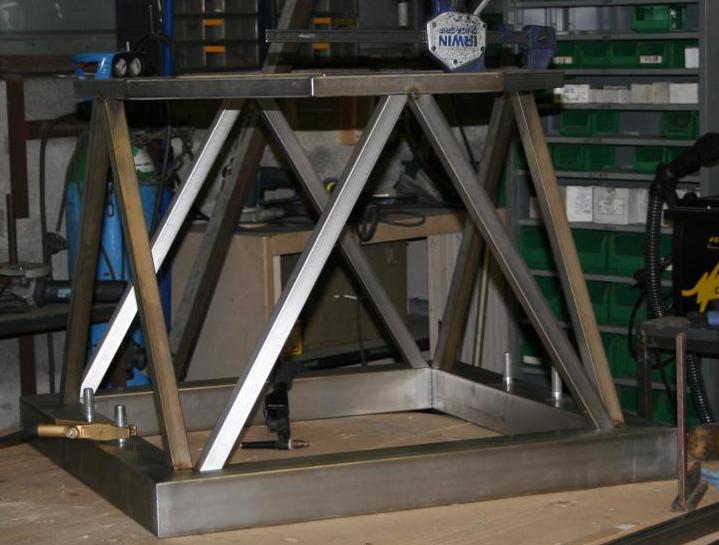
Le cahier des charges de la fourche est le suivant:
Et les plans sont les suivants:
La fabrication...

Ce calcul a été fait sur une feuille Excel. L'inertie de l'ensemble varie avec la position du tube.
Le dimensionnement a été fait suivant le cas le plus défavorable. Néanmoins le calcul des accélérations pourrait être optimisé en fonction de la position du tube. Et peut etre que le pointage le plus rapide sera obtenu dans certains cas par un passage par le zenith ?
Ce sera une monture 3 axes, comme les cubes équatoriaux.
Après peinture époxy cuite au four et remontage, le voici :

Ci dessous, la vue sur le moteur (en noir) de la vis poussante. Le gros moteur rouge est celui de l'entrainement de l'axe vertical de ma monture azimutale. Vous voyez aussi les 3 patins en bois dur. Ces patins vont être enduis d'époxy. Les couronnes blanches ont pour but de retenir l'huile raclée par les patins, et chaque tuyau bleu remmène l'huile au réservoir. Dans le réservoir une roue remet de l'huile sous le disque en acier.

Cette photo a été prise pendant un premier montage de verification et avant la peinture epoxy.
L'intégration se fera sur une remorque. D'une part pour pouvoir l'emmener à l'atelier de soudure inox si necéssaire et d'autre part pour l'emmener sur le site définitif.
22 Avril 2016 :
Gros travail à venir : intégration et vérifications

Equilibrage, motorisation des volets de protection, mesure de vitesse de pointage, et surtout mesure du miroir par la méthode de Rodier.
En résumé :
Le téléscope doit être commandé en local ou à distance, en direct ou par script.
Les solutions actuellement répandues sont éliminées, trop chères par rapport à ce qu'elles apportent et pas conçues au départ pour travailler en réseau.
Des liaisons de communication courtes distances USB ne sont ni fiables, ni pertinentes.
Les commandes manuelles du téléscope passeront par Wifi, une raquette sera une tablette sous Android, une autre sous Windows 8.1.
La même interface sera disponible depuis un PC de bureau.
Sur le PC de bureau nous aurons le logiciel "Carte du ciel" celui ci permet de pointer une direction à la souris. Avec le copier coller, les coordonnées passeront dans un autre logiciel de transformation de coordonnées. Ce logiciel enverra les ordres aux moteurs par TCP IP.
Le système de controle moteur sera à base de cartes Raspberry, ou Olimex ou MIcrochip PIC32 (solutions alternatives toutes valables). Les cartes de puissance seront des EVAL6480H. Le GPS avec PPS est connecté sur le service INTERVALONET.
Je prends en charge les dévelopements complémentaires.
La description complète est ici.
C'est pas comme les huitres ... les miroirs de téléscopes, plus c'est gros, meilleur c'est !
mailto:gerald.mauboussin@gmail.com
Page crée le 22.09.20
14 - - - - -Dernière mise à jour 23.06.2016.